











QRコード

お問い合わせ



住所
No. 22、中国広東省広州の香港道路

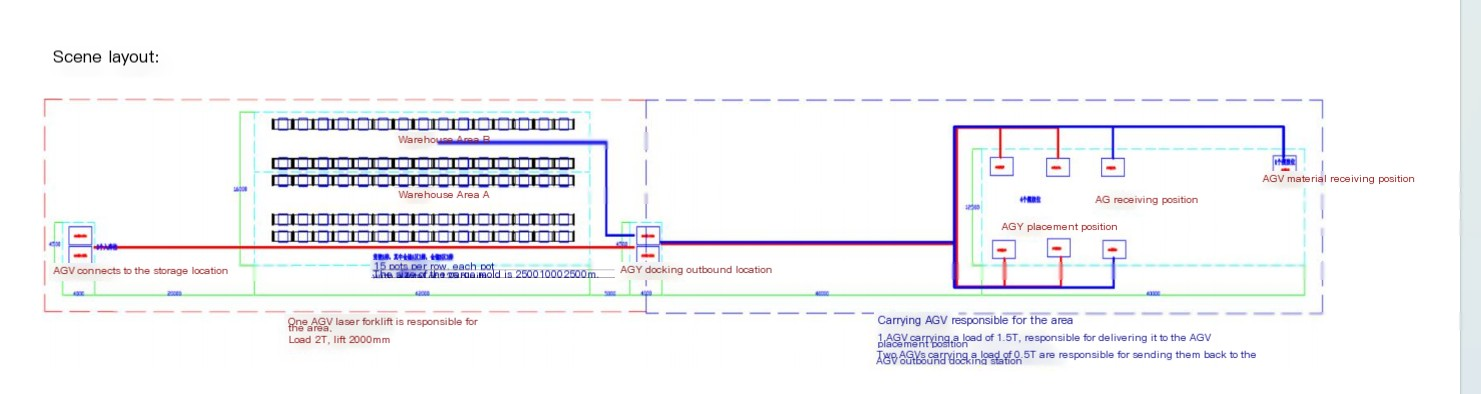
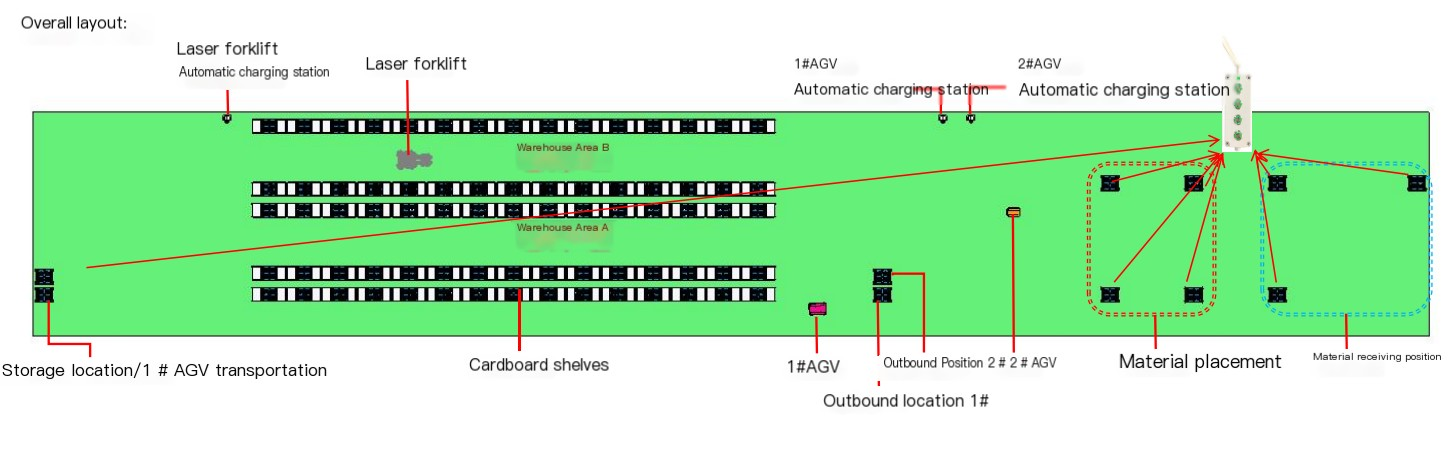
このプロジェクトの目的は、パレットの自動輸送と倉庫管理を達成することです。 AGVとレーザーフォークリフトの2種類の自動機器を導入することにより、輸送効率が改善され、手動介入が削減され、プロセスがスムーズで安全であることが保証されます。
製品の特性と要件分析
製品が1200mm * 1000mmの仕様を備えた単一の種類のカードボードであることを考慮すると、ソリューションのコア機器として、リフティングとハンドリングトロリーとレーザーフォークリフトを選択しました。 リフティングとハンドリングトロリーは、手動信号に基づいて異なる輸送ルートを選択して、パレットの柔軟な取り扱いを実現できます。 レーザーフォークリフトは、倉庫管理とパレットのインバウンドおよびアウトバウンド操作を担当し、在庫の精度と効率を確保します。
ワークフローデザイン
トロリーを持ち上げて輸送する作業プロセス:
材料をパレットに手動でコーディングし、コール信号を介してストレージと材料の配置位置を指定します。
信号を受信した後、AGV 1#はスタンバイ位置からストレージ位置に移動し、リフティングメカニズムを通してパレットを持ち上げ、材料配置位置に輸送します。
ストレージの位置がアイドル状態の場合、AGV 1#は引き続き新しいハンドリングタスクを受信したり、待機してスタンバイ位置に戻ったりできます。
すべてのチャネルには、2つのAGVがUターンを同時に実行できるようにするのに十分なスペースで予約されています。
レーザーフォークリフトワークフロー:
保管エリアで輸送されるのを待っているパレットがある場合、レーザーフォークリフトは保管エリアAから保管エリアに移動し、レーザーナビゲーションを使用してパレットを正確に見つけて輸送します。
材料の配置位置がアイドル状態の場合、レーザーフォークリフトは、後続の操作のためにパレットを位置1から材料配置位置に輸送します。
レーザーフォークリフトは、ストレージエリアAとBの間のパレットの処理も担当し、在庫のタイムリーな補充と調整を保証します。
レーザーフォークリフトは高度に自動化され、インテリジェントであり、最適なパスを自動的に計画し、取り扱い効率を改善できます。
機器の構成と利点
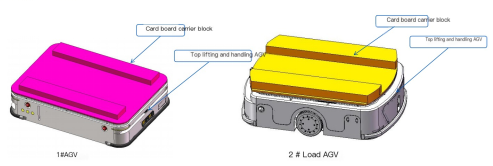
トロリーのトップリフティングと取り扱い:
輸送ルートの精度と安定性を確保するために、高精度のナビゲーションと位置決め技術を採用します。
リフティングメカニズムは合理的に設計されており、さまざまな高さとパレットの負荷の輸送ニーズに適応できます。
手動信号やその他のデバイスとの簡単なリンクを得るために、柔軟な通信インターフェイスを装備しています。
レーザーフォークリフト:
レーザーナビゲーションテクノロジーにより、Forkliftsが複雑な環境で正確に特定してナビゲートできるようになります。
倉庫管理の迅速な対応ニーズを満たすことができる効率的な取り扱い速度と安定性があります。
インテリジェントな管理システムを通じて、在庫のリアルタイムの更新とクエリを達成することができ、倉庫管理の透明性と精度を向上させることができます。
カートとレーザーフォークリフトの持ち上げと取り扱いを導入することにより、このプロジェクトは、パレットの自動輸送と倉庫管理、輸送効率と精度の向上、人件費とエラー率の削減を達成しました。
No. 22、中国広東省広州の香港道路
