











QRコード

お問い合わせ



住所
No. 22、中国広東省広州の香港道路

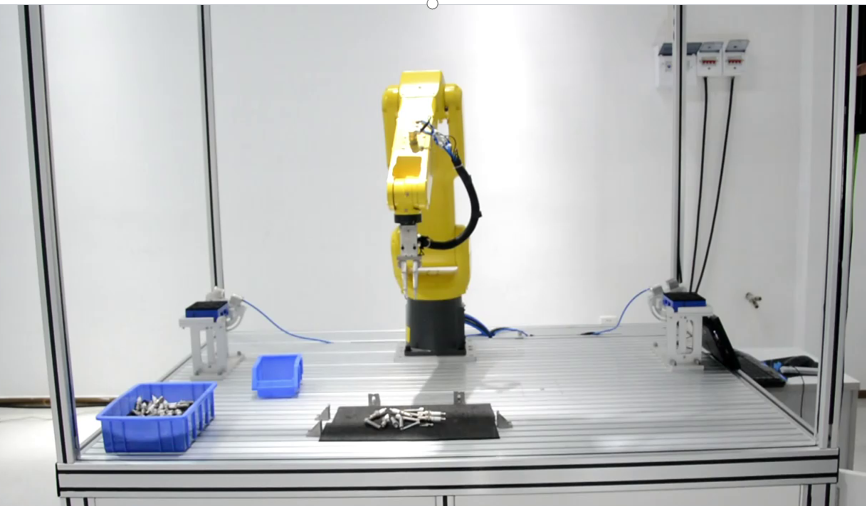
製造自動化の継続的な改善により、大規模な自動車部品エンタープライズは、生産効率を向上させ、人件費を削減するために、コンポジットロボットを使用してボルトソートを完了する必要性を提案しています。 Fuwei Intelligentは、3D産業用カメラと高性能コントローラーと組み合わせて複合ロボットを使用して、自動ボルト把持を実現し、それにより生産ラインの全体的な運用効率を改善します。
プロジェクトの問題
1.高精度の要件:ボルトは、製品の損傷または生産ラインのダウンタイムを避けて、ロボットを正確に識別して安定的に把握する必要がある小さなコンポーネントです。
2。ロボットは、異なる棚の位置やグリッピングポイントの変化などの動的な要因に適応する必要があります。
3.成分の精度を確保しながら、ロボットの動作プロセスを最適化し、全体的な運用効率を改善する必要があります。

解決
3D産業カメラと高性能コントローラーを利用することにより、ロボットはボルトコンポーネントを正確に見つけ、視覚的認識を通じてリアルタイムで把握戦略を調整し、安定性と精度を確保することができます。
Fuwei Intelligent Integrated Controllerは、ロボットと生産ラインの間のシームレスな統合を実現するために、ワークショップ信号を収集します。 多軸の同時制御、材料ラックの変化とグリッピングポイントの変化に応じた軌道の柔軟な調整、動的環境への適応。
宿題のプロセスを最適化し、待ち時間を短縮し、つかむ効率を向上させます。 合理的な宿題のサイクル時間を設定し、生産ラインの実際のニーズを満たすために需要に応じて、つかむとアセンブリの量を調整します。
アクションプロセス:
マテリアルグラブリクエストを受け取った後、複合ロボットは指定された製品位置に移動し始めます。 次に、ロボットは視覚的なポジショニングを実行して、製品の正確な認識と把握を確保します。 ポジショニングプロセス中、システムが設定値よりも少ないことをシステムが検出すると、アラームがトリガーされ、再配置を試みます。 ポジショニングが成功した場合、ロボットは引き続き把握操作を実行します。 ポジショニングが失敗した場合、次の製品の場所に移動して再試行します。 把握が成功した後、ロボットは製品をアンロードエリアに移動して、アンロード操作を完了します。 プロセス全体を通して、視覚的なポジショニングと把握が重要なステップであり、ロボットが荷重と荷降ろしタスクを効率的かつ正確に完了できるようにします。
技術的な利点:
環境照明の劇的な変化に適応し、肉体労働を置き換えることができます。
オブジェクトの検出とローカリゼーションのための深い学習に基づいたインテリジェントロボットアームの障害物の回避と軌跡計画アルゴリズム。
複数のワークピースが同時に作成されるシナリオに適応できます。
コアバリュー:
コストを削減し、効率を高め、安定性を向上させ、単純な操作で迅速に生産に入り、新製品に迅速に適応します。
この計画は、生産ラインの運用効率を大幅に改善します。 一方、正確なポジショニングと把握テクノロジーを通じて、製品の損傷と生産ラインのダウンタイムのリスクが減少し、製品の品質と生産安定性が向上する可能性があります。 さらに、動的環境への適応性と効率的なペース制御は、生産ラインの柔軟性と応答速度をさらに高め、GACトヨタの生産ニーズを常に変えます。
No. 22、中国広東省広州の香港道路
