











QRコード

お問い合わせ



住所
No. 22、中国広東省広州の香港道路

インテリジェントな技術の急速な発展は、伝統的な製造に新しい活力を注入するだけでなく、より効率的でインテリジェントな未来に業界を導きます。 特に、CNCの自動荷重と荷降ろしスキームの実装は、この革新における間違いなく輝く真珠です。独自の利点があるため、効率的な生産の新しい時代を静かに案内しています。 この変革的な技術的ブレークスルーは、生産ラインの自動化レベルを大幅に改善するだけでなく、正確な制御と効率的なコラボレーションを通じて生産プロセスを最適化およびアップグレードします。
プロジェクトの背景
プロセスステータス
生産ラインワーカーは、製品を備品に手動で組み立て、備品を配置テーブルとともに備品とともにCNC加工装置に輸送して製品処理のために輸送します。 CNC機器が処理された後、生産ラインワーカーは、CNC機器から加工製品を削除し、完成品の配置エリアに移します。
詳細を処理します
製品タイプ:複数ですが、さまざまな配置テーブルサイズのみです。配置テーブルサイズ:140 * 160、最大ワークサイズ450 * 450製品重量:18kg
ゼロポイントポジショニングステーション、この部分はすべての製品で同じです
車両接続ブロック、すべての製品には同じ(グリッピング位置)製品配置プラットフォームがあり、この部品のサイズは異なる製品で同じではない場合があります。
ドッキング要件の正確性:±1.5mm。各CNC機器の処理時間は約4〜6時間です
プログラムの目的
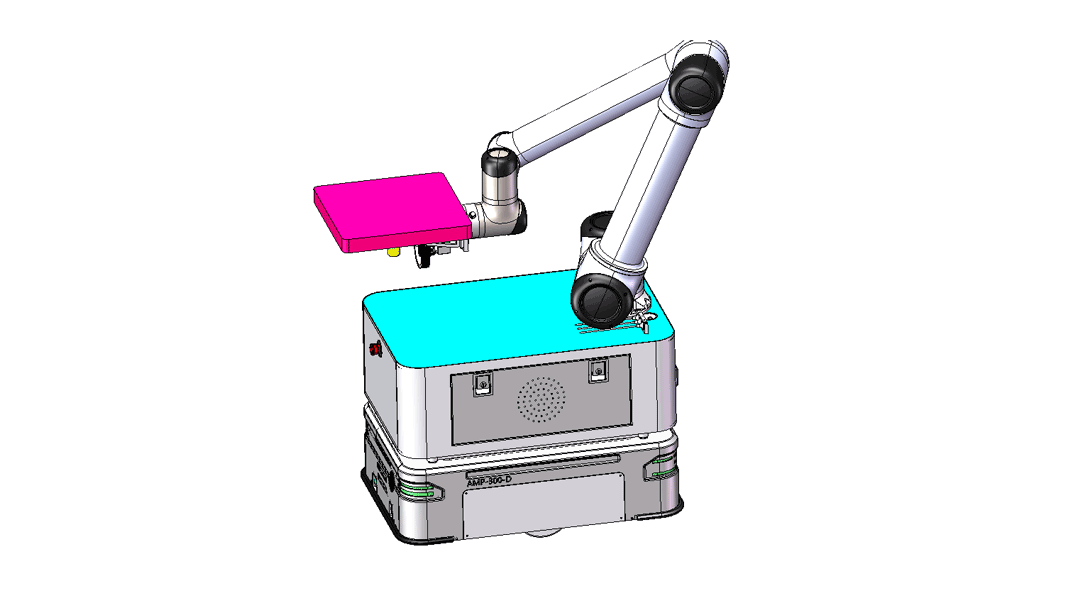
複合ロボットは、生産センターの指示に従って、生産プロセスの「製品処理」部分を自動的に完了します。 1.複合ロボットAMRは、生産センターの計画に従って生産状況をリアルタイムで調整できます。 2.複合ロボットAMRによるCNC加工の完了の自動確認と、完成品の完成製品の配置エリアへの自動転送が実現します。 3.荷重エリアの材料準備ステータスを決定し、アイドル状態または処理されたCNC機器に処理する製品を自動的に転送します。
コアの利点
1. AMRコンポジットロボットは、把握エラーと配置エラーを把握します<±1.5mm2
2.複合ロボットAMRは、車両に遭遇するときに自動降伏を実現し、歩行者または障害物の存在下で自動的に停止します。 3. AMRコンポジットロボットはCNC機器と統合されており、積み込みと荷降ろし中に倉庫のドアの自動開閉を制御できます。
3.複合ロボットのAMR包括的な配置の成功率は99%を超えています。
解決
全体的なレイアウト:1。オンサイトのレイアウトに従って、荷重とアンロード操作のために2つのAMRコンポジットロボットを構成します。
2. CNC加工センターとAMR複合ロボット間のヒューマンマシン相互作用シグナルと相互作用シグナルを介した完全な軌跡操作。 3. AGV車には、専用の自動充電ステーションが装備されており、全負荷で7.5時間継続的に動作すると予想されます。早期充電では20%未満のバッテリーレベルに設定できます。
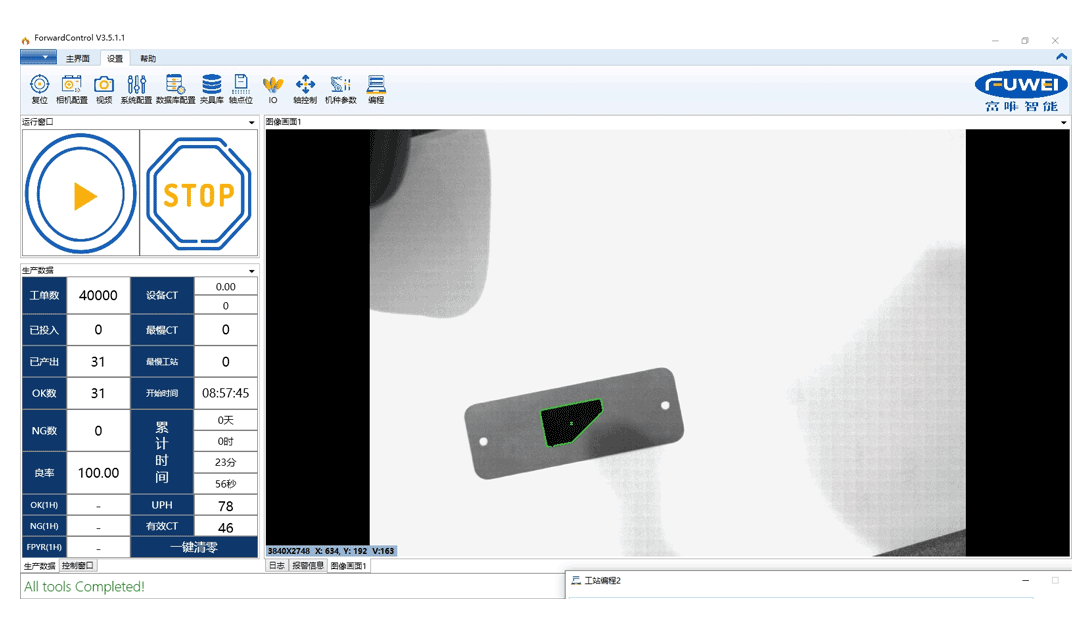
Fuweiによって開発された視覚認識ソフトウェアであるForwardVisionは、MARKターゲットの高精度認識と対応する位置情報の出力を実現できます。
このマークの認識効果はイラスト専用であり、最終的なマークスタイルと認識効果を表していません
製品機能の紹介
充電方法
自動充電:
このシステムは、AMRバッテリーレベルをリアルタイムで監視します。特定のしきい値(顧客が設定できる)を下回ると、システムはAMRを自動的にスケジュールして充電位置を見つけ、自動充電を開始し、情報を確認し、充電を開始し、デバイスはスタンバイ充電モードです。受信したタスクがある場合、充電から自律的に切断され、作業状態に入ります。
自動充電は、24時間の長期作業プロジェクトに適しています
手動充電:
このシステムは、AMRバッテリーの寿命をリアルタイムで監視します。特定のしきい値(顧客が設定できる)を下回ると、システムはAMRを自動的に充電位置に駆り立てるようにスケジュールしますが、サウンドとライトのプロンプトに、人員がタイムリーに請求するように責任を負わせます。
通信ドッキング方法
複合ロボットAMRはCNCから指示を受け取り、製品ライブラリに移動して、ボタンを通じて手動で組み立てられて確認された製品をつかみます。次に、対応するCNC機器に移動します。この時点で、複合ロボットAMRは、キャビンのドアが開いて材料交換を完了するのを待つために、CNC機器にドアの開口部のリクエストを送信します。その後、複合ロボットAMRはCNC機器に信号を送信して、キャビンのドアを閉めて機器を起動します。
ハードウェアの紹介
FMSスケジューリングシステム
バッテリーレベルが低い場合、AMRのバッテリーレベル、アラーム、または自動的に充電します。
AMR車両管理、交通状況、輸送タスクの指示に基づく効率的な輸送フローの最適化
AMR車両の割り当て、交通規制、および調整された回避に基づいて、効率的な輸送フローの最適化が達成されます。
倉庫の計画、配置、インバウンド、アウトバウンドなどに応じて、商品の自動処理と組織を達成できます
3次元ライブラリ管理システムと統合して、自動ストレージと検索を実現できます。
豊富なインターフェイス、1は、さまざまな材料管理システム、倉庫管理IWMなどとのインターフェースです。 さまざまな物理システムとインターフェイスできます。 mesのように
フィールドI0センサー信号
材料到着信号、エレベーター出口用のさまざまな自動ドアスイッチ、セルフエントリなど。
製品機能の紹介
充電方法
自動充電:
このシステムは、AMRバッテリーレベルをリアルタイムで監視します。特定のしきい値(顧客が設定できる)を下回ると、システムはAMRを自動的にスケジュールして充電位置を見つけ、自動充電を開始し、情報を確認し、充電を開始し、デバイスはスタンバイ充電モードです。受信したタスクがある場合、充電から自律的に切断され、作業状態に入ります。
自動充電は、24時間の長期作業プロジェクトに適しています
手動充電:
このシステムは、AMRバッテリーの寿命をリアルタイムで監視します。特定のしきい値(顧客が設定できる)を下回ると、システムはAMRを自動的に充電位置に駆り立てるようにスケジュールしますが、サウンドとライトのプロンプトに、人員がタイムリーに請求するように責任を負わせます。
通信ドッキング方法
複合ロボットAMRはCNCから指示を受け取り、製品ライブラリに移動して、ボタンを通じて手動で組み立てられて確認された製品をつかみます。次に、対応するCNC機器に移動します。この時点で、複合ロボットAMRは、キャビンのドアが開いて材料交換を完了するのを待つために、CNC機器にドアの開口部のリクエストを送信します。その後、複合ロボットAMRはCNC機器に信号を送信して、キャビンのドアを閉めて機器を起動します。
ハードウェアの紹介
FMSスケジューリングシステム
バッテリーレベルが低い場合、AMRのバッテリーレベル、アラーム、または自動的に充電します。
AMR車両管理、交通状況、輸送タスクの指示に基づく効率的な輸送フローの最適化
AMR車両の割り当て、交通規制、および調整された回避に基づいて、効率的な輸送フローの最適化が達成されます。
倉庫の計画、配置、インバウンド、アウトバウンドなどに応じて、商品の自動処理と組織を達成できます
3次元ライブラリ管理システムと統合して、自動ストレージと検索を実現できます。
豊富なインターフェイス、1は、さまざまな材料管理システム、倉庫管理IWMなどとのインターフェースです。 さまざまな物理システムとインターフェイスできます。 mesのように
フィールドI0センサー信号
材料到着信号、エレベーター出口用のさまざまな自動ドアスイッチ、セルフエントリなど。
No. 22、中国広東省広州の香港道路
