










QRコード

お問い合わせ



住所
No. 22、中国広東省広州の香港道路

アルミニウム合金パネルのオイルブラッシング、乾燥、積み込み、荷降ろしプロセスの自動化要件を満たすための3Dビジョンガイダンスに基づくソリューションを提案します。 このソリューションは、高度な3Dビジョンテクノロジーを導入することにより、パネルの高精度認識と位置付けを実現し、それにより生産効率と品質安定性を改善します。
計画の概要
この計画は、それぞれ荷重およびアンロード領域に3D視力システムを構成することにより、アルミニウム合金パネルの正確な識別と位置を達成します。 給餌エリアは、吸引給餌方法を採用して、パネルが生産ラインにスムーズかつ正確に入るようにします。 アンロードエリアは、ロボットによって自動化され、ボードをつかんで配置します。 同時に、給油プロセスが製品の前面と接触しないようにするために、私たちは給油装置をサイドまたはトップの給油方法として設計しました。
計画の実装
荷重エリアの実装
ローディングエリアに、高解像度カメラと画像処理ユニットを含む3Dビジョンシステムをインストールしました。 センサーがワークピースを検出すると、カメラはすぐに写真を撮り、画像データを画像処理ユニットに送信します。 画像処理ユニットは、アルゴリズムを介して画像を処理し、ボードの輪郭情報と位置情報を抽出し、ボードのY1値を計算します。 次に、Y1値に基づいて、吸引装置が制御され、プレートが正確に吸い込まれ、スムーズに生産ラインに供給されます。
アンロードエリアの実装
アンロードエリアでは、3Dビジョンシステムと、高精度の把握および配置機能を備えたロボットも装備しています。 センサー1がワークピースを検出すると、カメラは写真を撮り、製品1のY1値を提供します。 その後、センサー2がワークピースを検出すると、ロボットはY1値に基づいて積1を正確に把握し、指定された位置に配置します。 同様に、センサーがワークピースを再度検出し、製品2のY2値を提供すると、ロボットは把握および配置操作を再度実行します。 プロセス全体を通して、配置精度が±2mmの要件を満たすようにするために、アルゴリズムと校正カメラパラメーターを最適化しました。

解決:
フィーダーの±2mmの配置精度を達成することの難しさに対処するために、次の措置を講じました。
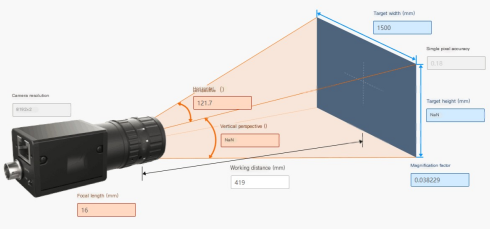
カメラの解像度と視野の幅を改善する幅:高解像度カメラを選択して、画像データの精度を高めます。 同時に、生産ラインの実際の状況に従って視野幅のカメラフィールドを調整して、ワークフロー全体のカバレッジを確保します。
画像処理アルゴリズムの最適化:アルミニウム合金パネルの特性と表面テクスチャに関する詳細な研究を実施することにより、画像処理アルゴリズムを最適化して、等高線認識と位置計算の精度を向上させます。
ロボットパラメーターの正確なキャリブレーション:ロボットアームの長さや関節角などのパラメーターを含むロボットを正確に調整して、把握および配置操作中の高い安定性と精度を確保します。

このソリューションは、3Dビジョン技術を導入することにより、アルミニウム合金パネルのオイルブラッシング、乾燥、積み込み、荷降ろしプロセスの効率的な自動化を実現します。 アルゴリズムを最適化し、機器パラメーターを正確に校正することにより、フィーダーの配置精度の問題をうまく解決し、生産効率と品質安定性を改善しました。
No. 22、中国広東省広州の香港道路
