











QRコード

お問い合わせ



住所
No. 22、中国広東省広州の香港道路

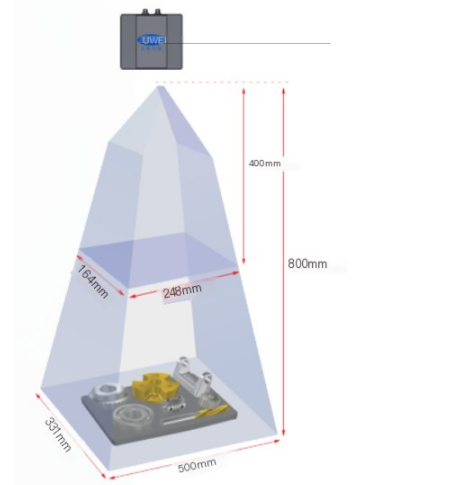
アルミニウム合金シートメタル処理の自動化された組立ラインでは、フィーダーの配置精度が製品の最終的な品質と生産効率に直接影響します。 フィーダーが忙しい生産ラインの指定された位置にワークを正確に配置できるようにする方法が、私たちが直面している大きな課題になりました。 今日、3D視覚ガイダンスソリューションを発表します。これにより、フィーダーの配置精度が±2mmに達し、視野幅1500mmとカメラ解像度が2,000万に達します。

1、高精度3Dビジョンシステム
まず、ソリューションは高精度3Dビジョンシステムを採用しています。 このシステムは、高速カメラと高度な画像処理アルゴリズムを使用して、生産ラインのリアルタイムワーク情報情報をキャプチャし、3D再構成を実行します。 視野幅1500mm内で、当社のシステムはワークピースのすべての詳細を明確に識別し、その後の配置に正確なデータサポートを提供することができます。
2、インテリジェントアルゴリズムの最適化
ただし、高精度の視覚システムのみに依存するだけでは十分ではありません。 材料の配置精度が±2mmに達するようにするには、アルゴリズムを最適化する必要もあります。 当社のR&Dチームは、広範な実験やデータ分析を通じて、視覚認識、経路計画、ロボット制御など、さまざまな側面に正確な調整と最適化を行いました。
視覚的認識の観点から、高度な特徴抽出とマッチングアルゴリズムを採用しており、ワークピースの位置と姿勢を正確に識別できます。 パス計画に関しては、ロボットの動きの軌跡、ワークピースの形状とサイズなど、ロボットを最適な経路に沿って配置できるようにするなど、さまざまな要因を検討します。 ロボット制御に関しては、高精度サーボモーターとコントローラーを使用して、ロボットがプリセットパスと速度に応じて移動できるようにします。
3、リアルタイムのフィードバックと調整
さらに、システムには、リアルタイムのフィードバックと調整を提供する機能もあります。 ロボットの配置の過程で、当社のシステムはワークの位置と姿勢をリアルタイムで継続的に監視し、監視結果を制御システムに戻します。 実際の配置位置とプリセット位置の間に偏差がある場合、制御システムはすぐにロボットを微調整して、最終的な配置精度が±2mmに達するようにします。
3D Visual Guidanceソリューションを通じて、複数のアルミニウム合金シートメタル加工企業におけるフィーダー配置の精度を正常に改善しました。 実際のアプリケーションでは、システムは生産効率を改善するだけでなく、欠陥率を低下させ、企業に有形の経済的利益をもたらします。
要約すると、3D視覚ガイダンスソリューションは、高精度の視覚システム、インテリジェントアルゴリズムの最適化、リアルタイムフィードバックと調整を介したアルミニウム合金シート処理におけるフィーダーの配置精度を正常に改善しました。 将来的には、ソリューションを最適化および改善し続け、より効率的で正確な自動化処理ソリューションをより多くの企業にもたらします。
No. 22、中国広東省広州の香港道路
