











QRコード

お問い合わせ



住所
No. 22、中国広東省広州の香港道路

効率、精度、自動化を追求する近代的な製造業では、CNC加工技術の適用がますます広まっています。 ただし、CNC工作機械の荷重と荷重プロセスは、生産効率を制限するボトルネックになることがよくあります。 この制限を克服するために、Fuweii Intelligentは複合ロボットCNC自動荷重とアンロードソリューションを開始し、生産プロセスを再構築し、生産効率と柔軟性を改善しました。
プロジェクトの概要
このプロジェクトの目的は、CNC加工中に原材料の自動積み込みとアンロード、および必要な検査と清掃プロセスを達成することを目的としています。 コンポジットAGV(自動誘導車両)ロボットアームシステムを導入することにより、スキャンカメラとポジショニングビジョンカメラと組み合わせて、正確で効率的な材料の取り扱いとプロセス管理を実現できます。
システム構成
複合AGVロボットアームシステム:AGVボディ、ロボットアーム、スキャンカメラ、視覚カメラの配置などの主要なコンポーネントが含まれています。
制御システム:AGVロボットアームシステムを制御して、マテリアルグラビング、取り扱い、配置などのアクションを完了するために、ear領域機器システムからタスク信号を受信する責任があります。
スキャンシステム:スキャンカメラでマテリアルトレイのQRコードをスキャンすることにより、材料情報を入力して追跡できます。
ポジショニングシステム:ポジショニングビジョンカメラを利用して、AGVロボットアームシステムの正確なポジショニングとナビゲーションを実現します。
ワークフロー
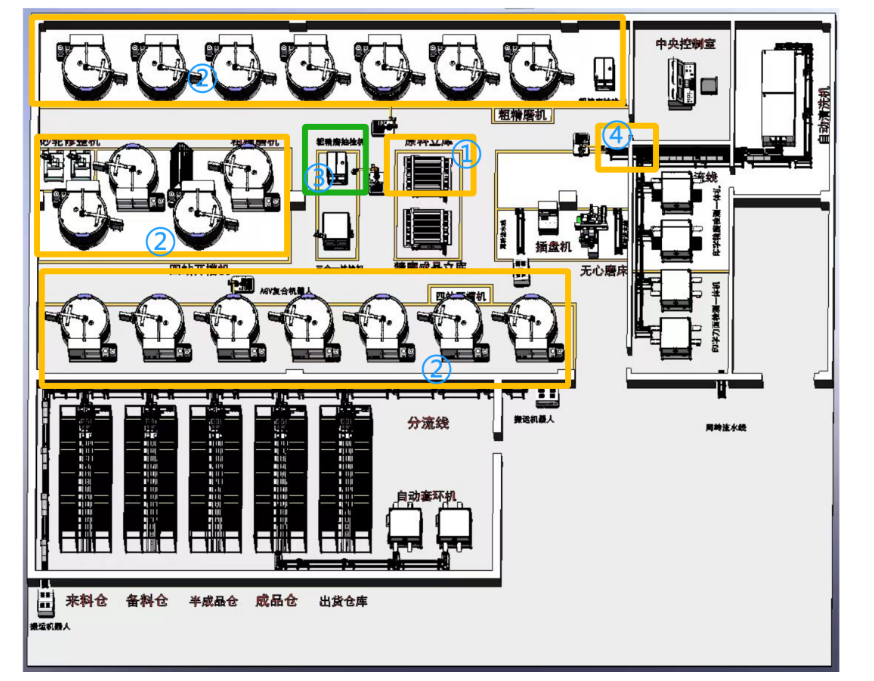
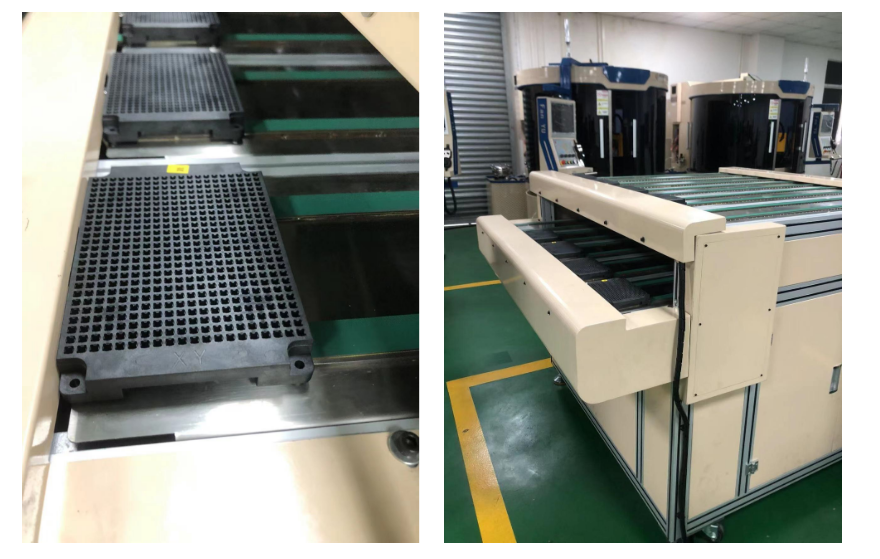
原材料のつかみ:複合AGVロボットアームシステムは、原材料貯蔵の最初の層に進み、制御システムの命令に従って処理する材料をつかみます。
処理手順:キャプチャされた材料をエリアのマシンに配信し、マシンの内部配置位置に従って配置し、処理を待ちます。
テストプロセス(オプション):システムがテストリクエストを発行した場合、エリアのマシンのテスト位置からモールドディスクを、テストのためにエリアのテスト機器の配置エリアに送信します。 検査が完了したら、モールドディスクをエリアのマシンに送り返します。
洗浄プロセス:エリアの機器で処理された材料を、エリア④のクリーニングマシンのコンベアラインに配置すると、材料洗浄作業はコンベアラインによって自動的に完了します。
技術的な実装
複合AGVロボットアームシステム:高度なAGVテクノロジーとロボットアームテクノロジーを採用して、効率的かつ正確な材料処理を実現します。
スキャンシステム:高性能スキャンカメラを使用して、材料情報の正確な入力と追跡を確保します。
ポジショニングシステム:高度な視覚的ポジショニングテクノロジーを利用して、AGVロボットアームシステムの正確なポジショニングとナビゲーションを実現します。
制御システム:信頼できる制御システムを採用して、システム全体の安定した動作と効率的な協力を確保します。
システムの利点
高度な自動化:CNC加工プロセスでの原材料の自動荷重と荷重、検出、清掃の実現、生産効率の向上。
高精度:スキャンカメラを使用して視覚カメラを配置することにより、材料情報の正確な入力と正確な位置決めを実現できます。
強力な柔軟性:さまざまな生産要件を満たすための実際のニーズに応じて、ワークフローを柔軟に調整できます。
強力なトレーサビリティ:スキャンシステムを使用して、プロセス全体を通して材料情報を追跡および追跡することにより、製品品質管理のレベルを改善できます。
No. 22、中国広東省広州の香港道路
