











QRコード

お問い合わせ



住所
No. 22、中国広東省広州の香港道路

プロジェクトの概要
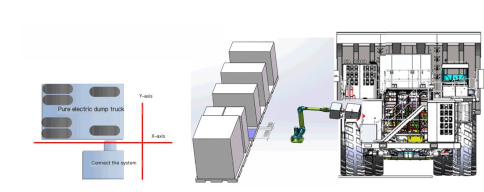
このプロジェクトの目的は、上海地域の屋内生産条件下で顧客の充電ニーズを満たすために、効率的で安定したダンプトラック自動充電システムを設計することです。 システムは、エンジニアリング車両の無人操作と制御を実現する必要があり、生産ラインの継続的な動作要件を満たすために、ポイントAとBの取り扱いと自動充電機能を完了するだけです。
システム構成
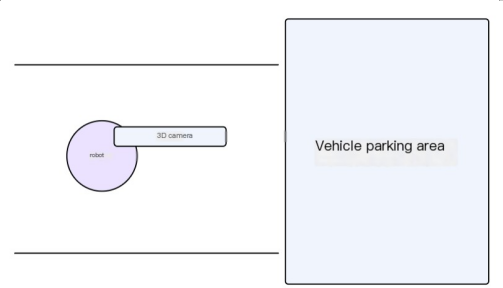
視覚的ポジショニングシステム:高精度カメラと視覚アルゴリズムを利用して、ダンプトラックの充電ポートの正確な位置決めを実現します。 視覚システムには、ほこりや直射日光に抵抗する能力が必要であり、さまざまな屋内環境で安定した操作を確保する必要があります。
ロボットと銃の押しメカニズム:3m以上の腕スパンを持つ産業ロボットが選択され、特別に設計された銃の押しメカニズムが装備されています。 銃を押すメカニズムは、充電ガンを正確かつ迅速に充電ポートに挿入できるように、十分な推力と精度を持つ必要があります。
充電システム:3メガワットの高出力充電装置を装備し、ダンプトラックを短時間で完全に充電し、生産効率を改善できるようにします。
制御システム:統合された制御システムを通じて、視覚的なポジショニング、ロボットの動き、充電プロセスの正確な制御を実現できます。 制御システムには、自動化とインテリジェンスの特性が高く、無人の自動充電を実現できる必要があります。
ワークフロー
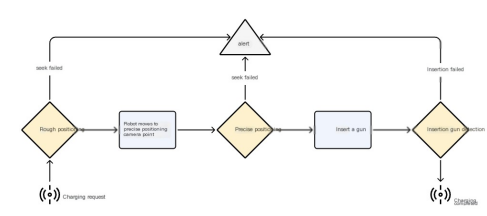
セルフダンピングトラックのポジショニング:視覚的なポジショニングシステムを介して、ダンプトラックの充電ポート位置を特定して見つけます。
ロボットモーション:制御システムは、視覚的なポジショニング結果に基づいて、ダンプトラックの充電ポートの近くを移動するようにロボットを導きます。
押し込み銃の挿入:ロボットには押しの銃のメカニズムが装備されており、充電ガンをダンプトラックの充電ポートに正確かつ迅速に挿入します。
充電プロセス:充電システムは、プリセットのパワーレベルまたは時間に達するまでダンプトラックの充電を開始します。
ロボット避難:充電が完了した後、ロボットは充電ポートを避難し、次のダンプトラックの到着を待ちます。
重要なテクノロジー
視覚的ポジショニングテクノロジー:ディープラーニングなどのアルゴリズムを使用することにより、視覚的ポジショニングシステムの精度と安定性を改善できます。
ロボット制御技術:ロボットのモーション軌道と速度を最適化して、充電効率を向上させます。
銃の押しメカニズムの設計:構造的なコンパクト性と信頼性を考慮しながら、銃を押すメカニズムが十分な推力と精度を持っていることを確認してください。
リスク対応
屋内環境保護:清潔で乾燥した屋内環境を確保し、視覚的ポジショニングシステムに対するほこりと直射日光の影響を減らします。
ハードウェアのメンテナンス:通常の動作を確保するために、ロボットや視覚的なポジショニングシステムなどのハードウェアを定期的にメンテナンスして維持します。
専門的な評価:専門家に、ソリューションの安全性と実現可能性を確保するために、銃の押しメカニズム、充電システムなどを評価および最適化するよう招待します。
No. 22、中国広東省広州の香港道路
