










QRコード

お問い合わせ



住所
No. 22、中国広東省広州の香港道路

同期位置とマップ構築とも呼ばれるSLAMは、モバイルロボットテクノロジーの分野で重要なコアテクノロジーです。 ロボットは、自律的なナビゲーションと探索を達成するための鍵である未知の環境で自分の位置を同時に推定し、環境地図を構築することができます。
1、スラムテクノロジーの原則
SLAMテクノロジーの中心的なアイデアは、センサーデータ(LIDAR、カメラなど)の融合と処理を通じて、未知の環境でのロボットの自己ローカリゼーションを実現し、マップすることです。 具体的には、SLAMテクノロジーは、フロントエンドの匂いとバックエンドの最適化という2つの主要な部分で構成されています。
1。フロントエンド走行距離計:このセクションは、主にセンサーデータを介してロボットのモーション軌跡を推定する責任があります。 連続した時点でセンサーデータの変化を分析することにより、ロボットの相対的な変位と態度変換を計算します。 一般的な方法には、フィーチャマッチング、光学フローなどが含まれます。フロントエンド走行距離計の出力はロボットのポーズの予備的推定ですが、センサーノイズと蓄積されたエラーのため、これらの推定結果は十分に正確ではありません。
2。バックエンドの最適化:ポジショニングの精度とマップの一貫性を改善するために、スラムテクノロジーはバックエンド最適化プロセスを導入します。 このセクションでは、履歴データ、ループ検出、およびその他の方法を使用して、フロントエンド走行距離計の結果を調整および最適化します。 一般的に使用される最適化方法には、フィルターベースの方法(拡張カルマンフィルター、粒子フィルターなど)およびグラフベースの最適化方法が含まれます。 これらの方法は、累積エラーを効果的に減らし、ロボットの位置決めとマップ構築の精度を向上させることができます。
3 boltsモバイルロボットでのスラムテクノロジーの適用
モバイルロボットのコアテクノロジーの1つであるSLAMテクノロジーは、複数の分野で幅広いアプリケーションの見通しを持っています。 いくつかの典型的なアプリケーションケースは次のとおりです。
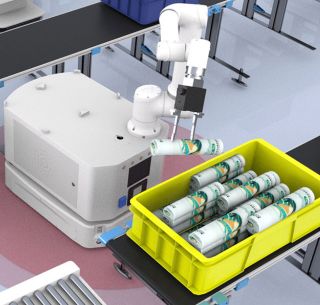
1。自律ナビゲーション:倉庫と物流、機械加工などの分野では、モバイルロボットが自律的なナビゲーション機能を達成する必要があります。 スラムテクノロジーを利用することにより、ロボットは周囲をリアルタイムで知覚し、マップを構築することができ、最適なパスを計画し、ターゲットの場所に自律的に向かうことができます。 これにより、ロボットの作業効率と自律性が大幅に向上します。
2。環境探査とモデリング:未知の環境では、モバイルロボットは環境探査とモデリングにスラムテクノロジーを使用できます。 センサーデータを継続的に収集し、マップ情報を更新することにより。
3。人間の機械の相互作用とインテリジェントサービス:人工知能技術の継続的な開発により、モバイルロボットは、人間の機械の相互作用とインテリジェントサービスの分野でますます適用されています。 スラムテクノロジーを利用して正確なポジショニングとシーン認識を実現することにより、ロボットはユーザーによりパーソナライズされたインテリジェントなサービスエクスペリエンスを提供できます。 たとえば、ショッピングモールで顧客を導いたり、自宅にいる高齢者に顧客を導くと、幅広いアプリケーションの見通しがあります。
スラムテクノロジーは、モバイルロボットのコアテクノロジーの1つとして、自律的なナビゲーションと環境探査の達成に強力なサポートを提供します。 同時に、複雑で絶えず変化するアプリケーションのシナリオと絶えずアップグレードされたユーザーの需要に直面して、モバイルロボットテクノロジーのさらなる開発と適用を促進するために、新しいスラムテクノロジーと方法に注意を払い、研究し続ける必要があります。
No. 22、中国広東省広州の香港道路
