











QRコード

お問い合わせ



住所
No. 22、中国広東省広州の香港道路

製造業界がより高い精度と効率に向かって加速するにつれて、生産プロセスの自動化とインテリジェンスのレベルに高い要件が置かれています。 慣性リングなどの複雑で非常に正確なワークピースに直面して、従来の荷重方法は不十分になりました。 現時点では、3Dビジョンテクノロジーの台頭により、この問題に革新的なソリューションがもたらされました。 給餌の精度を大幅に向上させるだけでなく、生産ラインの柔軟性と効率を大幅に向上させます。
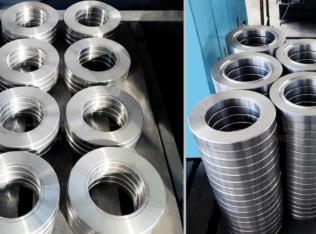
3Dビジョンテクノロジーの基本原則は、コンピューターを介したオブジェクトの3次元空間情報を処理および分析し、オブジェクト認識、検出、追跡、測定などの操作を実現することです。 慣性リングの正確な給餌の適用において、3Dビジョンテクノロジーは、慣性リングの3次元空間情報をキャプチャし、ロボットに正確な把握位置と姿勢を提供し、慣性リングの正確な給餌を実現します。

イメージングアルゴリズムの観点から、3D Vision Technologyは、表面反射や慣性リングのオイルフィルムカバレッジなどの複雑な状況に対処するために、高度なアルゴリズムを採用しています。 アルゴリズムを最適化することにより、システムは明確で正確なポイントクラウドデータを生成し、その後の認識とキャプチャの強固な基盤を提供します。
カメラの選択に関しては、3Dビジョンシステムは、高解像度、大きな視野、および大きな被写界深度を持つカメラを選択する必要があります。 このタイプのカメラは、慣性リングの完全な形状とサイズの情報をキャプチャし、ロボットが把握プロセス中にターゲット位置を正確に見つけることができるようにします。 同時に、広い被写界深度の特性により、カメラは異なる距離で明確なイメージング効果を維持することができ、給餌の精度をさらに向上させます。

イメージングアルゴリズムとカメラの選択に加えて、3Dビジョンテクノロジーもロボット制御システムと密接に統合する必要があります。 ロボット制御システムに慣性リングのリアルタイムの3次元空間情報を送信することにより、ロボットは慣性リングの位置を正確に見つけて把握できます。 このリアルタイム情報交換により、ロボットは、さまざまな仕様の慣性リングに直面して柔軟な生産を達成するときに、把握戦略をすばやく調整できます。
3Dビジョンテクノロジーは、慣性リングの正確な給餌プロセスにおいて重要な役割を果たしてきました。 イメージングアルゴリズムを最適化し、適切なカメラを選択し、ロボット制御システムと密接に協力することにより、このテクノロジーは慣性リングの効率的かつ正確な把握を実現し、生産効率を改善し、生産コストを削減します。
No. 22、中国広東省広州の香港道路
