











QRコード

お問い合わせ



住所
No. 22、中国広東省広州の香港道路

インテリジェントな製造技術の継続的な開発により、磁気鋼生産の分野での自動生産ラインの適用がますます広まっています。 ただし、従来の手動荷重と荷降ろし方法には、効率が低い、不安定な品質、重大な安全性の危険など、現代の生産のニーズを満たすことができなくなります。 これらの問題に対応して、磁気鋼の荷重と荷降ろしにフウェイのインテリジェントな複合ロボットを使用し、生産効率を改善し、人件費を削減し、運用上の安全性を確保し、磁気鋼生産の自動化と知性を達成することを目指しているソリューションを提案します。
業界の問題点:
1.手動操作への高い依存は、生産効率が低く、不安定な品質につながります。
2。手作業では、手のつままや衝撃などの事故など、運用プロセス中に安全上の危険があります。
3.職場環境の悪さは、オペレーターの健康に対する潜在的な脅威をもたらします。
4.手動操作は、大規模で高効率の生産ニーズを満たすのが困難です。

顧客のニーズとソリューションの概要
顧客の需要:顧客は、Fuweiインテリジェントな複合ロボットを介して磁気鋼の自動荷重と荷重を自動的に積み降ろし、生産効率と品質の安定性を改善したいと考えています。 特定の要件には、2種類の製品の積み込みと積み込みの完了が含まれ、サイクル時間は約80秒で、2つの製品の積み込みを完了し、高精度要件があります。
解決策の概要
お客様のニーズを満たすために、次の改修計画を提案します。
1.モーターとサーボコントローラーを交換して、ロボットのパフォーマンスと安定性を改善します。
2。レーダーナビゲーション、ライトストリップ、スピーカーを装備して、ロボットの自律的なナビゲーション、視認性、およびインタラクティブを強化します。
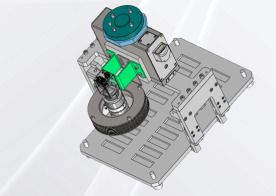
3.カメラとセンサーを統合するカスタマイズされたグリッパーを設計して、磁気鋼の正確な識別と把握を実現します。
4.ロボットが作業を正確かつ効率的に完了できるようにするために、荷重とアンロード領域のレイアウトと機器の構成を最適化します。
4、改修計画の詳細な実装
複合ロボット変換

ロボットモーションの精度と安定性を確保するために、高性能モーターとサーボコントローラーを選択します。
レーダーナビゲーションを装備して、ロボットの自律的な位置決めと経路計画を達成します。
LEDライトストリップとアラームスピーカーを取り付けて、ロボットの視認性と互換性を高めます。
カメラとセンサーを統合するカスタマイズされたグリッパーを設計して、磁気鋼の正確な識別と握りを実現します。
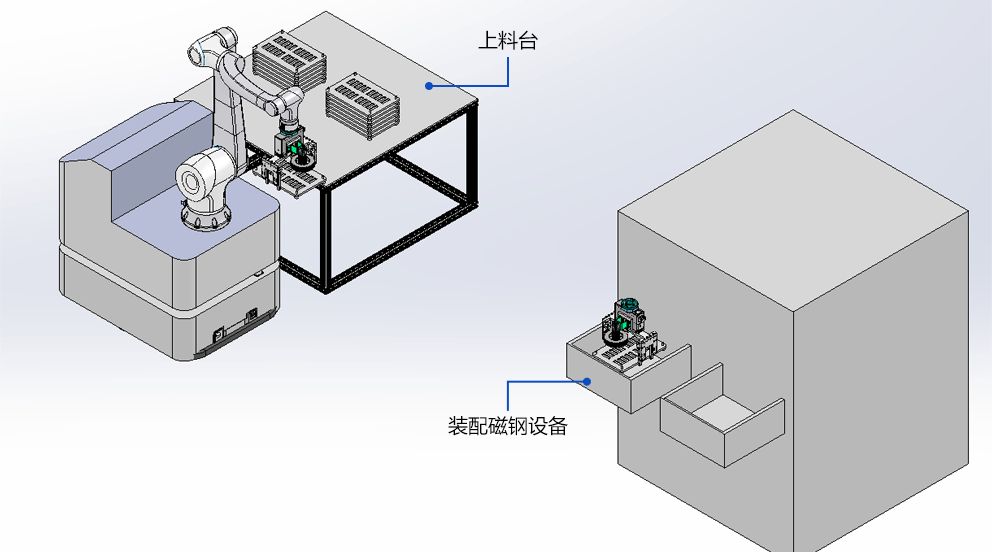
荷重領域の最適化
設計ポジショニングガイドスロットは、磁気鋼を指定された位置に導くためのスロットをガイドします。
デスクトップポジショニングマーカーをセットアップして、ロボットの認識と把握ポイントのポジショニングを容易にします。
アンロードエリアの改修
デバイスの位置決めマークを設定して、ロボットが磁気鋼を正確に配置するようにします。
電気コントロールパネルのドアと電気制御スライディングスロットを取り付けて、オペレーターを傷害から保護し、自動機器の排出を実現します。
実行ロジックとプロセス最適化
ソリューション全体の実行ロジックは、自動化された生産ラインのプロセス設計に基づいており、ワークフローの連続性と効率を確保します。 プロセス全体が読み込みリクエストによってトリガーされ、ロボットは荷重領域の準備が整っているかどうかに基づいて材料検索操作を実行します。 材料の選択と配置の過程で、グリッパーに統合されたカメラとセンサーを介して、正確な認識と力制御が達成されます。 磁石が機器に正常に配置されると、ロボットは荷重の完了を確認し、次のサイクルに進みます。
磁気鋼の積み込みと荷重のためにFuweiインテリジェントな複合ロボットを使用することにより、従来の手動負荷と荷降ろし方法の問題を効果的に解決し、生産効率を改善し、人件費を削減し、運用上の安全を確保することができます。 同時に、このソリューションは、スケーラビリティと柔軟性が高く、異なるスケールや生産ニーズの磁気鋼生産企業に適応できます。
No. 22、中国広東省広州の香港道路
